Nissan ARIYA 2024 Manuels d’utilisation
9.19.3. Limites du système Intelligent Emergency Braking (Freinage d'urgence intelligent (AEB)) avec fonction de détection des piétons

Les limites du système Intelligent Emergency Braking (Freinage d'urgence intelligent (AEB)) avec fonction de détection des piétons sont indiquées ci-dessous. Ne pas tenir compte de ces limites pendant la conduite du véhicule pourrait entraîner de graves blessures ou la mort.
Le système Intelligent Emergency Braking (Freinage d'urgence intelligent (AEB)) avec fonction de détection des piétons ne peut pas détecter tous les véhicules, cyclistes ou piétons dans toutes les conditions.
Le système Intelligent Emergency Braking (Freinage d'urgence intelligent) avec détection des piétons ne détecte pas les éléments suivants :
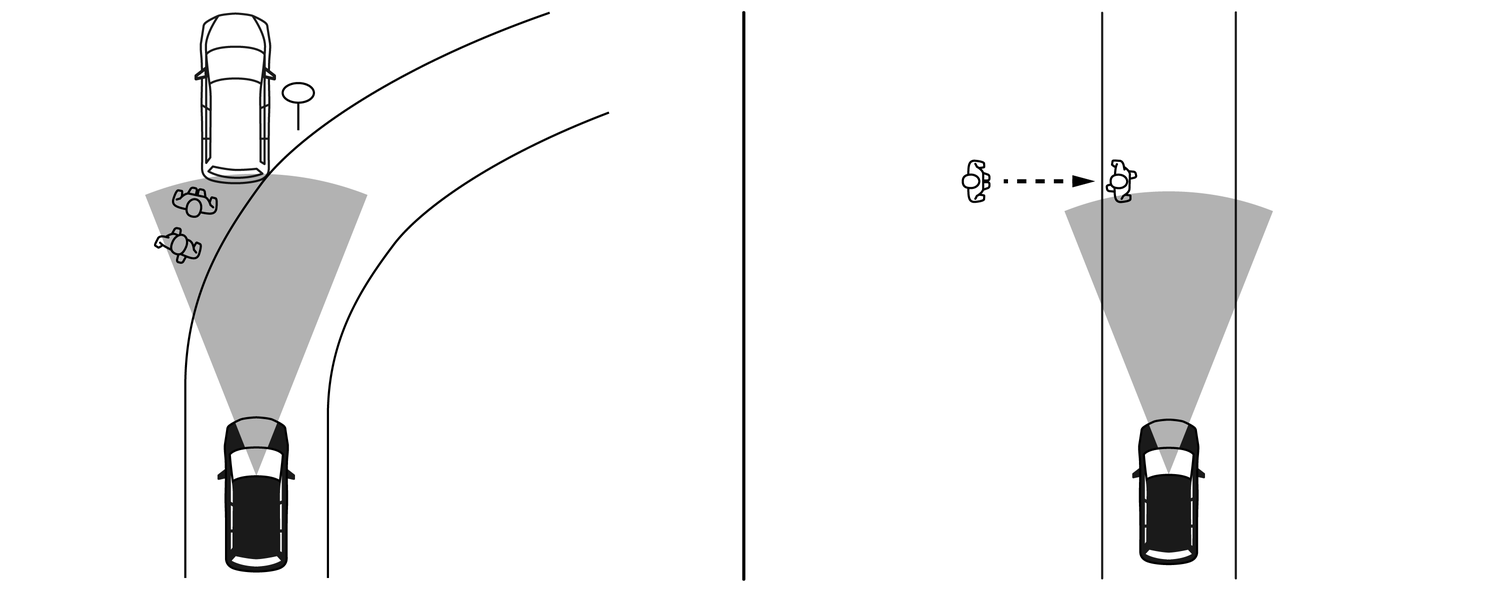
Piétons de petite taille (par exemple, les enfants), en position assise, qui utilisent des jouets/planches à roulettes, sur des scooters ou en fauteuil roulant, ou qui ne sont pas debout ou en position de marche.
Animaux de toute taille.
Obstacles (par exemple, cargaison ou débris) sur la chaussée ou le bord de la route.
Les véhicules qui traversent.
Véhicules dont les pneus sont difficiles à voir ou dont la forme de l'arrière du véhicule n'est pas claire ou est obstruée.
Véhicules en stationnement.
Les performances du système Intelligent Emergency Braking (Freinage d'urgence intelligent (AEB)) avec fonction de détection des piétons sont quelque peu limitées.
Si un véhicule est à l'arrêt sur la trajectoire du véhicule, le système ne fonctionne pas lorsque votre véhicule s'en approche à une vitesse supérieure à environ 100 km/h (62 MPH).
La détection des piétons et cyclistes ne fonctionne pas lorsque le véhicule est conduit à une vitesse supérieure à environ 80 km/h (50 MPH) ou inférieure à environ 10 km/h (6 MPH).
En présence de piétons, le système Intelligent Emergency Braking (Freinage d'urgence intelligent) avec détection des piétons peut ne pas émettre le premier avertissement.
Le système Intelligent Emergency Braking (Freinage d'urgence intelligent (AEB)) avec fonction de détection des piétons peut ne pas fonctionner correctement ou ne pas détecter un véhicule, un piéton ou un cycliste (modèles avec fonction de détection des cyclistes) situé devant dans les conditions suivantes :
Dans des conditions de mauvaise visibilité (comme la pluie, la neige, le brouillard, les tempêtes de poussière, les tempêtes de sable, la fumée et les éclaboussures provenant d'autres véhicules).
Si de la saleté, du givre, de la neige, du brouillard ou d'autres matériaux recouvrent la surface du capteur radar ou la surface de la caméra du pare-brise.
Si une lumière intense (par exemple, la lumière du soleil ou des feux de route) pénètre dans la caméra avant ou si un changement soudain de luminosité se produit (par exemple, en entrant dans un tunnel ou en conduisant sous l'effet de la foudre).
Dans l'obscurité ou en cas de faible luminosité, comme la nuit ou dans les tunnels, y compris lorsque les phares de votre véhicule sont éteints ou que les feux arrière du véhicule devant vous sont éteints.
Lorsque la direction de la caméra est mal orientée.
Lorsque vous conduisez sur une pente raide, sur des routes aux virages serrés, et/ou sur des routes cahoteuses ou en terre.
En cas d'interférence d'autres sources radar.
Lorsque la position ou le mouvement de votre véhicule change rapidement ou de manière significative (par exemple, changement de voie, véhicule qui tourne, direction brusque, accélération ou décélération soudaine).
Lorsque votre véhicule ou le véhicule, le piéton ou le cycliste qui vous précède se déplace rapidement ou de manière significative, de sorte que le système ne peut pas le détecter et réagir à temps (par exemple, un piéton se rapprochant rapidement du véhicule à courte distance, un véhicule qui s'engage, un changement de voie, un virage, une direction brusque, une accélération ou une décélération soudaine).
Lorsque le véhicule, le piéton ou le cycliste est décalé de la trajectoire avant du véhicule.
Si la différence de vitesse entre les deux véhicules est faible.
Le profil du piéton est partiellement obscurci ou non identifiable ; par exemple, parce qu'il transporte des bagages, pousse une poussette, porte des vêtements ou des accessoires encombrants ou très amples, ou se trouve dans une posture particulière (les mains levées par exemple).
Le contraste entre une personne et l'arrière-plan est faible, par exemple si la couleur ou le motif des vêtements est similaire à l'arrière-plan.
Pendant environ 15 secondes après le démarrage du système du véhicule électrique.
Lorsque le système n'a jamais détecté d'obstacle depuis que le véhicule a été conduit après le démarrage du système EV.
Si le véhicule qui précède ou roulant en sens inverse a une forme unique ou inhabituelle, des hauteurs de dégagement extrêmement basses ou élevées, ou un chargement inhabituel ou est étroit (par exemple, une moto).
Lorsque le véhicule, le piéton ou le cycliste se trouve à proximité d'un panneau de signalisation, d'une zone réfléchissante (par exemple, de l'eau sur la route), ou est dans l'ombre.
Lorsque plusieurs piétons ou cyclistes sont regroupés.
Lorsque la vue du piéton ou du cycliste est masquée par un véhicule ou un autre objet.
En cas d'attelage d'une remorque ou de remorquage d'un autre véhicule.
Les performances du système peuvent se dégrader dans les conditions suivantes :
Le véhicule roule sur une route glissante.
Le véhicule roule sur une pente.
Des bagages excessivement lourds sont chargés sur le siège arrière ou dans le compartiment à bagages de votre véhicule.
Le système est conçu pour vérifier automatiquement le fonctionnement du capteur (radar et caméra), dans certaines limites. Le système risque de ne pas détecter certaines formes d'obstructions au niveau de la zone du capteur telles que du givre, de la neige, de la boue ou des autocollants par exemple. Dans ce cas, le système risque de ne pas avertir le conducteur correctement. Veillez à vérifier, nettoyer et dégager régulièrement la surface des capteurs.
En fonction de l'état de la route et des conditions de circulation, le système Intelligent Emergency Braking (Freinage d'urgence intelligent (AEB)) avec fonction de détection des piétons peut actionner partiellement les freins de manière inattendue. Lorsqu'une accélération est nécessaire, appuyez sur la pédale d'accélérateur pour neutraliser le système.
Le système Intelligent Emergency Braking (Freinage d'urgence intelligent) avec détection des piétons peut fonctionner lorsqu'un motif, un objet, une ombre ou des lumières sont détectés et sont similaires au contour des véhicules, des piétons ou s'ils sont de la même taille et position que les feux arrière d'un véhicule ou d'une motocyclette.
Le système peut continuer à fonctionner lorsque le véhicule qui précède tourne à droite ou à gauche.
Le système peut fonctionner lorsque votre véhicule s'approche et dépasse un véhicule devant vous.
En fonction de la forme de la route (route en courbe, entrée et sortie de courbe, route sinueuse, régulation des voies, en construction, etc.), le système peut fonctionner temporairement pour le véhicule en approche devant votre véhicule.
Le système Intelligent Emergency Braking (Freinage d'urgence intelligent (AEB)) avec système de détection des piétons peut réagir face à des :
objets sur le bord de la route (panneau de signalisation, rail de sécurité, piéton, cycliste, moto, véhicule, etc.)
piétons ou cyclistes lors de la conduite dans des allées étroites, etc
piétons et cyclistes qui apparaissent brièvement dans la voie de circulation ou qui s'en approchent pour éviter les obstacles sur l'accotement.
objets situés au-dessus de la route (pont bas, panneau de signalisation, etc.)
objets sur le revêtement de la route (voie ferrée, grille, plaque d'acier, etc.)
objets dans un parking couvert (poutre, pilier, etc.)
piétons, cyclistes ou motos s'approchant de la voie de circulation
véhicules, piétons, cyclistes, motos ou objets sur des voies adjacentes ou à proximité du véhicule
piétons et cyclistes en approche
aux objets sur la route (des arbres par exemple)
Les distances de freinage augmentent sur les surfaces glissantes.
Un bruit excessif peut interférer avec le témoin d'avertissement sonore. Il est possible que vous n'entendiez pas le témoin sonore.
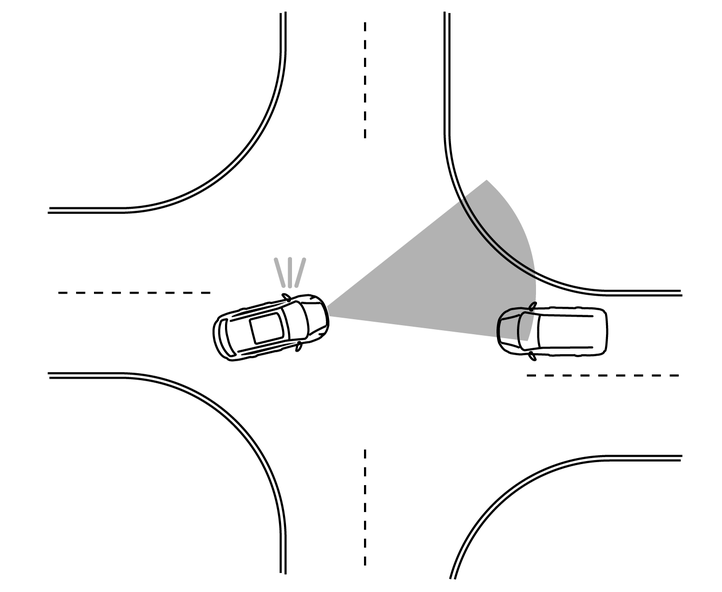
L'aide à l'intersection ne freine pas pour les véhicules en approche devant de votre véhicule.
Outre les limitations du système qui s'appliquent au système Intelligent Emergency Braking (Freinage d'urgence intelligent (AEB)) avec fonction de détection des piétons, les limitations suivantes s'appliquent au système Intelligent Emergency Braking (Freinage d'urgence intelligent (AEB)) avec fonction de détection des piétons lorsque l'aide à l'intersection fonctionne :
L'aide à l'intersection risque de ne pas détecter un véhicule en approche ou un piéton dans les conditions suivantes :
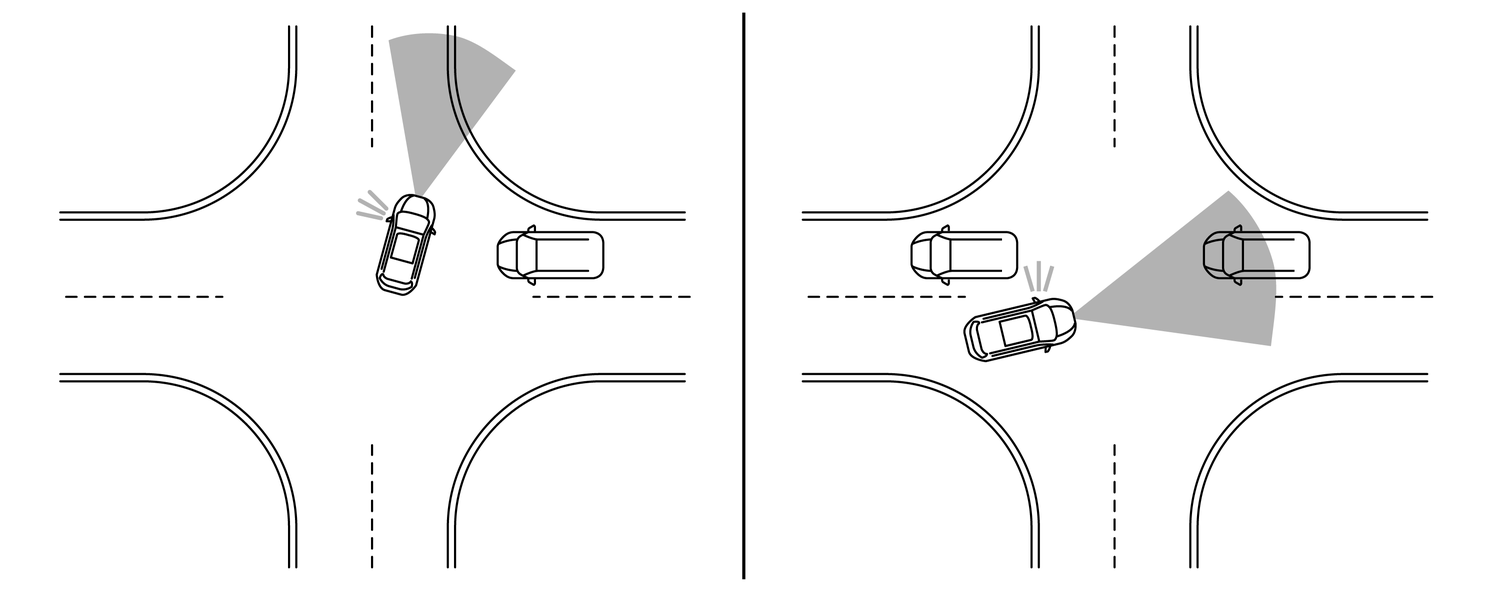
Lorsque vous conduisez dans une voie de circulation séparée par plus de 2 voies des véhicules en approche lors d'un virage à droite ou à gauche.
Lorsque vous ne vous dirigez pas directement vers un véhicule en approche lors d'un virage à droite ou à gauche.
L'aide à l'intersection risque de ne pas détecter un véhicule en approche lorsque vous avez déjà entamé votre virage.
Lors d'un virage serré ou dans un virage très large.
Lorsque la ligne centrale n'est pas reconnue par le système.
Lorsque plusieurs véhicules en approche se suivent en ligne.
Lorsque la voie est plus large ou plus étroite que la normale.
Lorsque la ligne centrale est située à proximité d'une signalisation routière.
L'aide à l'intersection peut freiner lors d'un virage à droite ou à gauche même si le risque de collision est faible.
L'aide à l'intersection peut également freiner lorsque le mouvement des véhicules en approche ne peut être prédit en raison de virages soudains à gauche ou à droite ou d'une décélération des véhicules en approche.
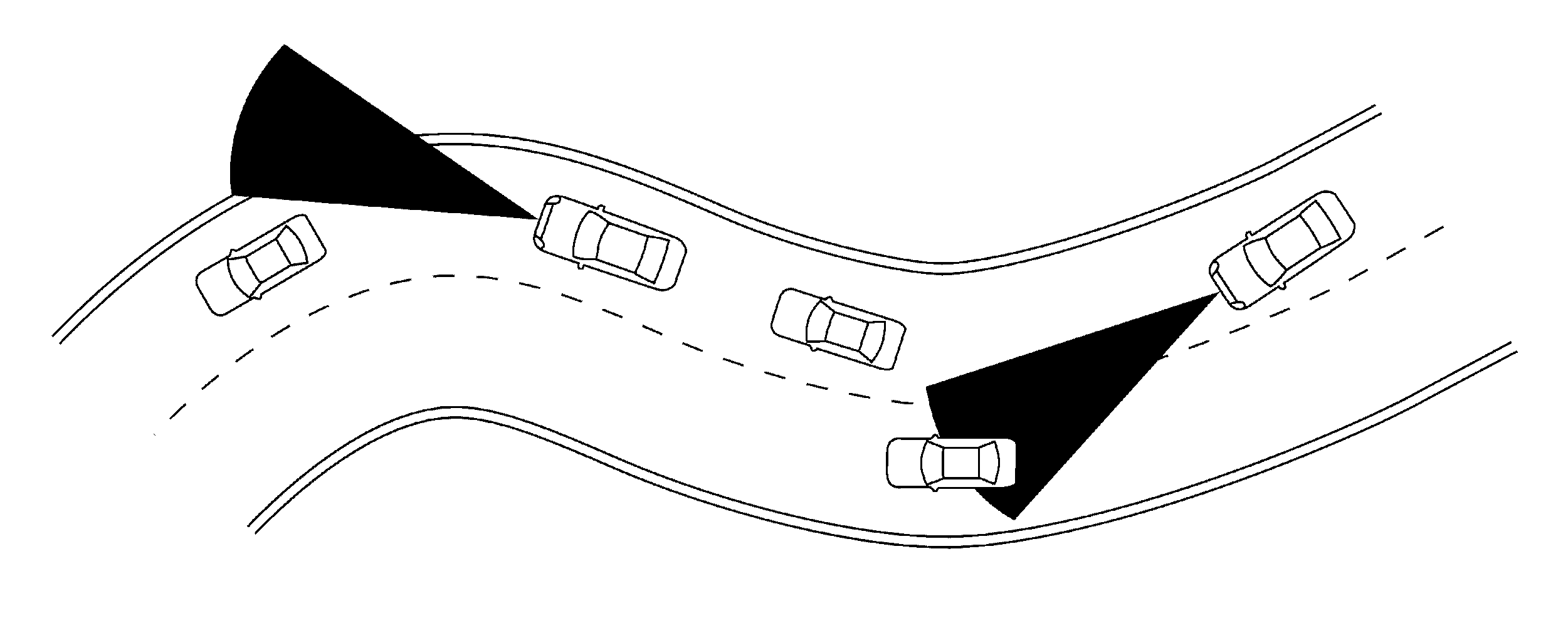
En cas de conduite sur routes sinueuses, vallonnées, en lacets, étroites ou en travaux ou lorsque vous conduisez sur une pente, il est possible que le capteur détecte des véhicules circulant dans une autre voie, ou qu'il ne détecte provisoirement pas un véhicule qui précède. Ceci peut entraîner un mauvais fonctionnement du système.
Le déplacement (manœuvre de direction ou position de circulation dans la voie, etc.) ou l'état du véhicule peuvent également affecter la détection des véhicules. Si cela se produit, le système peut vous avertir en faisant clignoter le témoin du système et en déclenchant le témoin sonore de manière inattendue. Vous devrez contrôler vous-même la distance de sécurité convenable par rapport au véhicule qui précède.